Rowma Public Console
This video shows that rowma_ros starts an roslaunch command from Public Console via the Internet.
Setup rowma_ros
Run this command (for more information, see rowma_ros document).
python <(curl "https://raw.githubusercontent.com/rowma/rowma_ros/master/install.py" -s -N)
Open Public Console
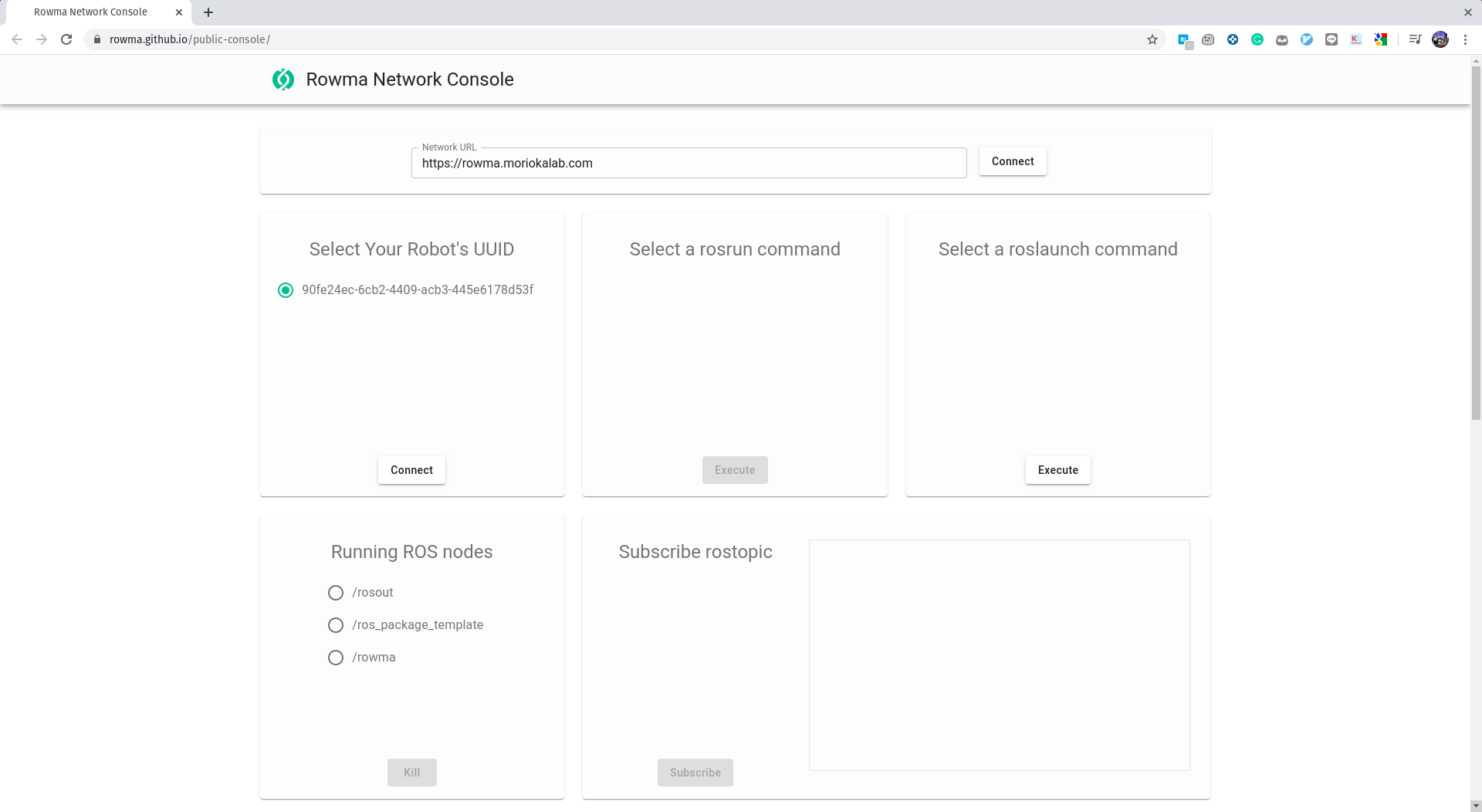
Access Public Console. We recommend you to use Google Chrome.
Run rowma_ros
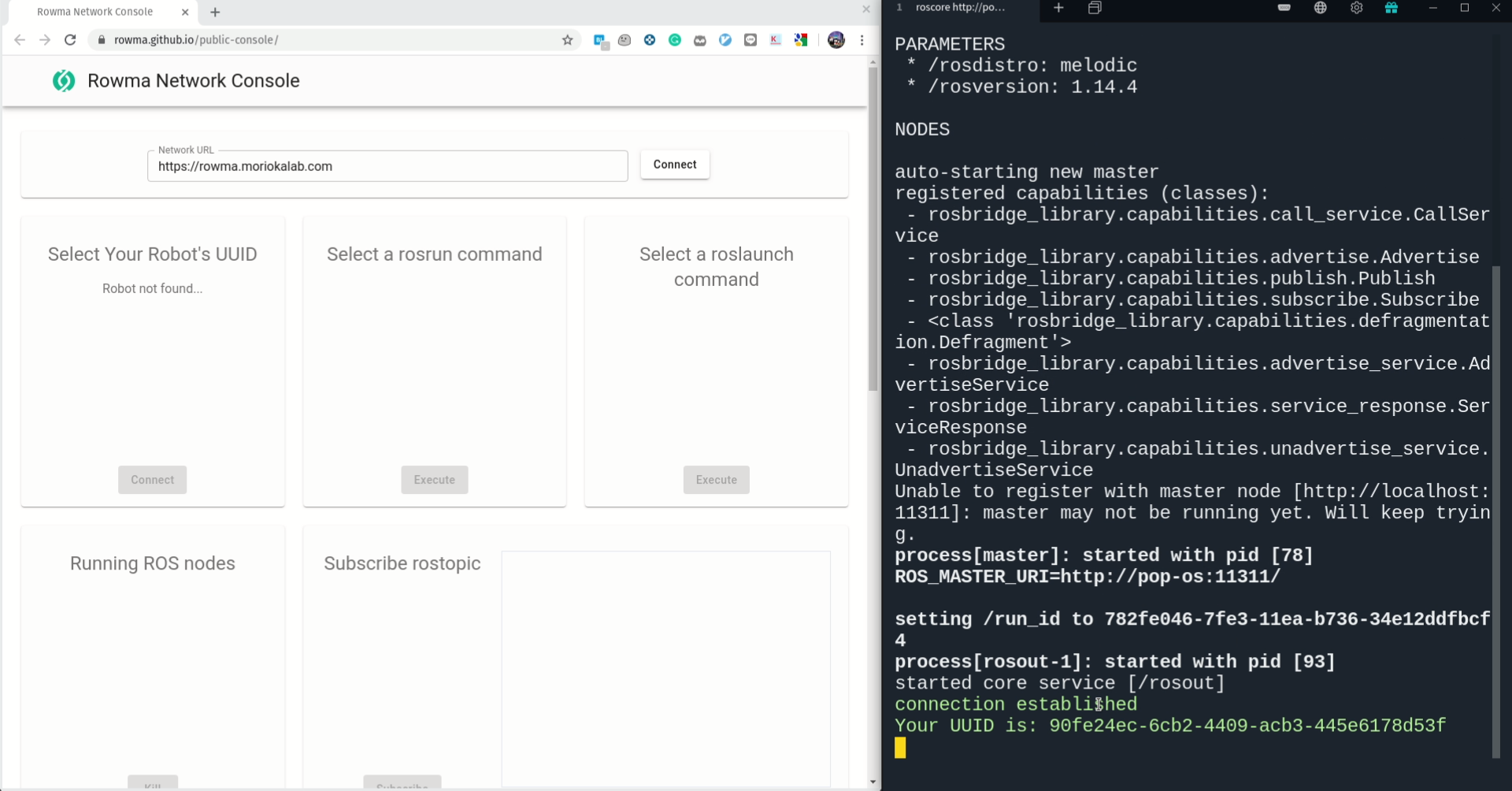
rosrun rowma_ros rowma
Click connect button
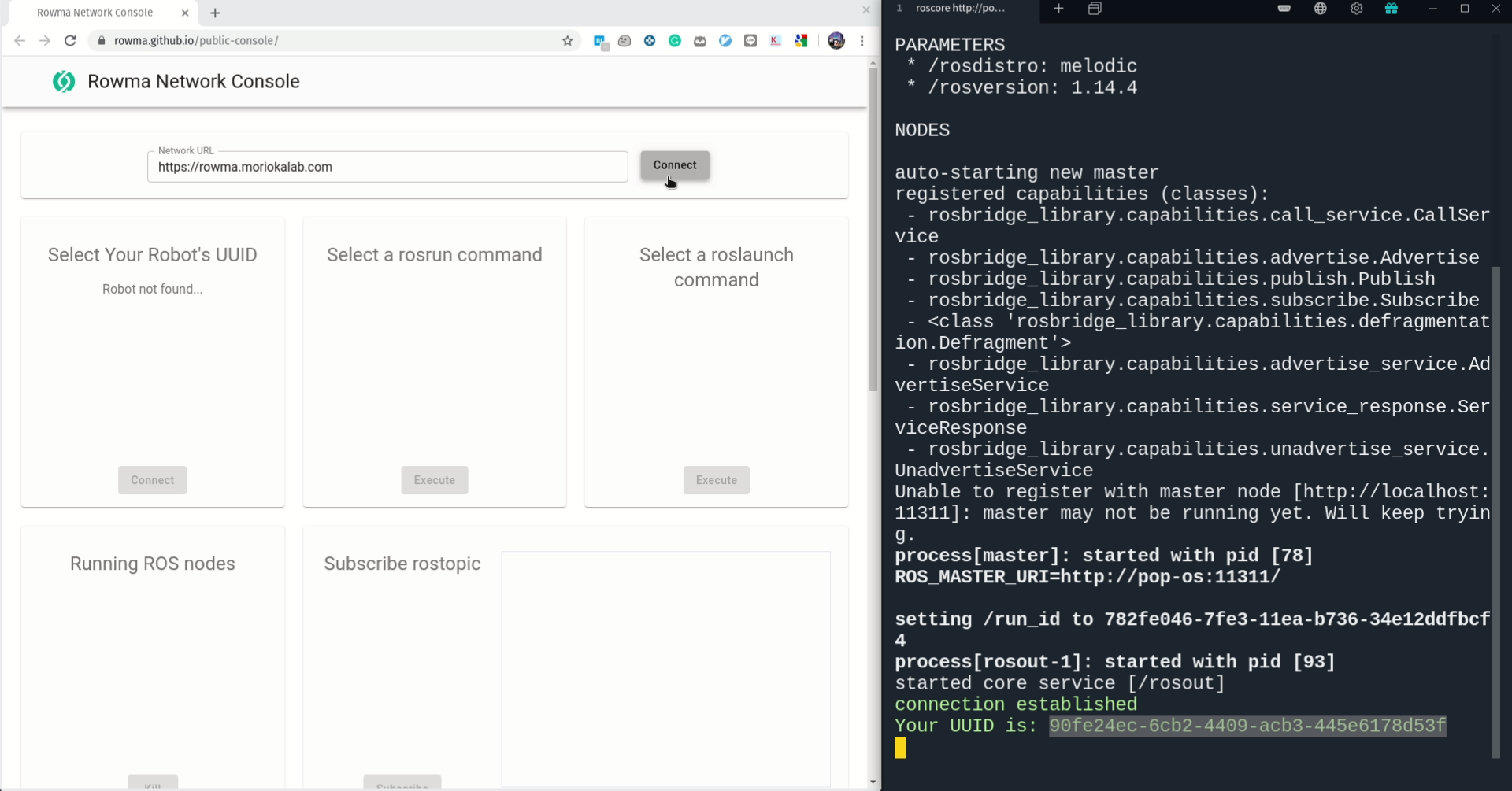
Click the Connect button after you see rowma_ros starts successfuly.
Select a robot
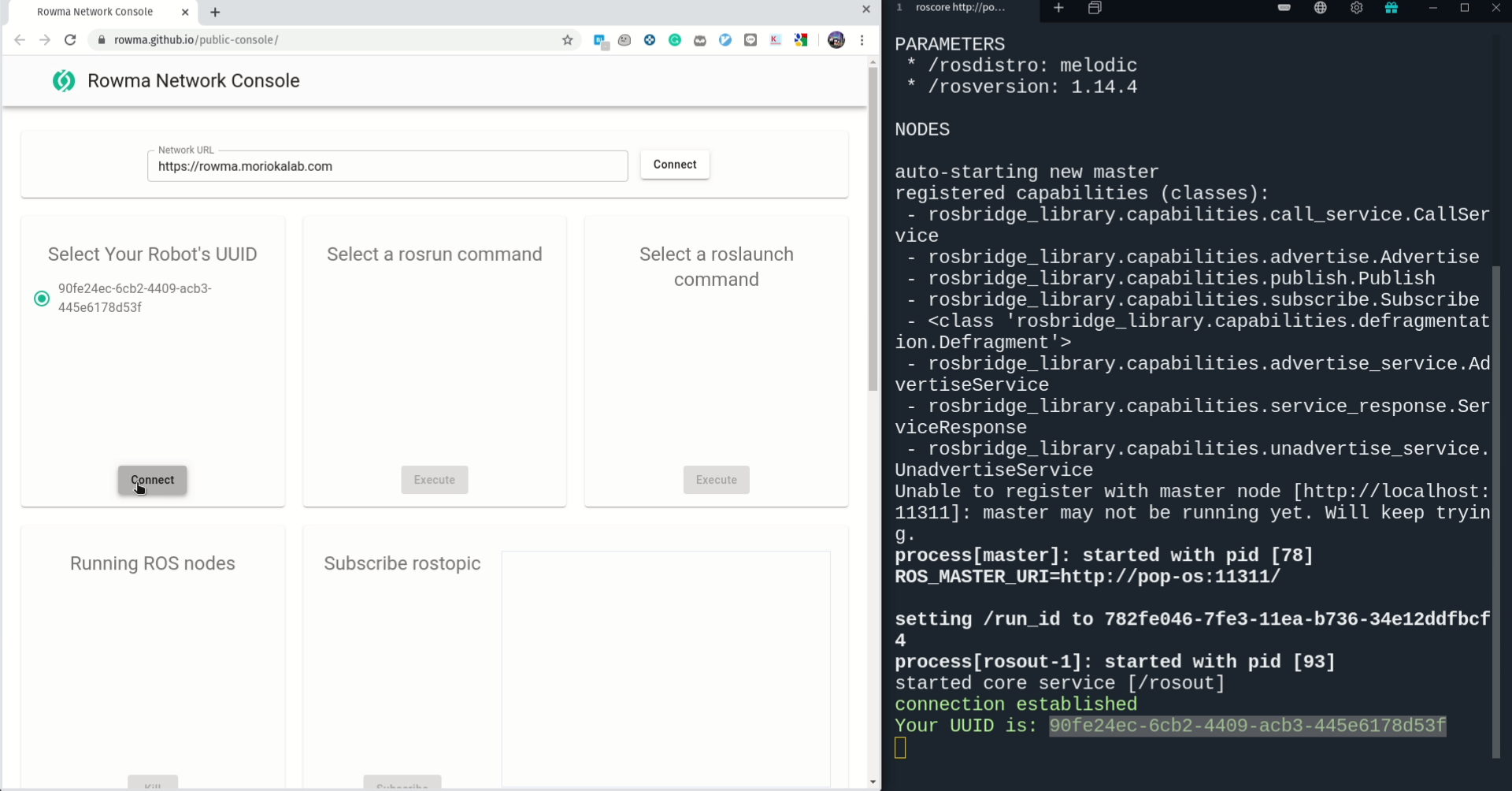
Select a robot by UUID that is displayed in the terminal, and click Connect button.
Run a roslaunch
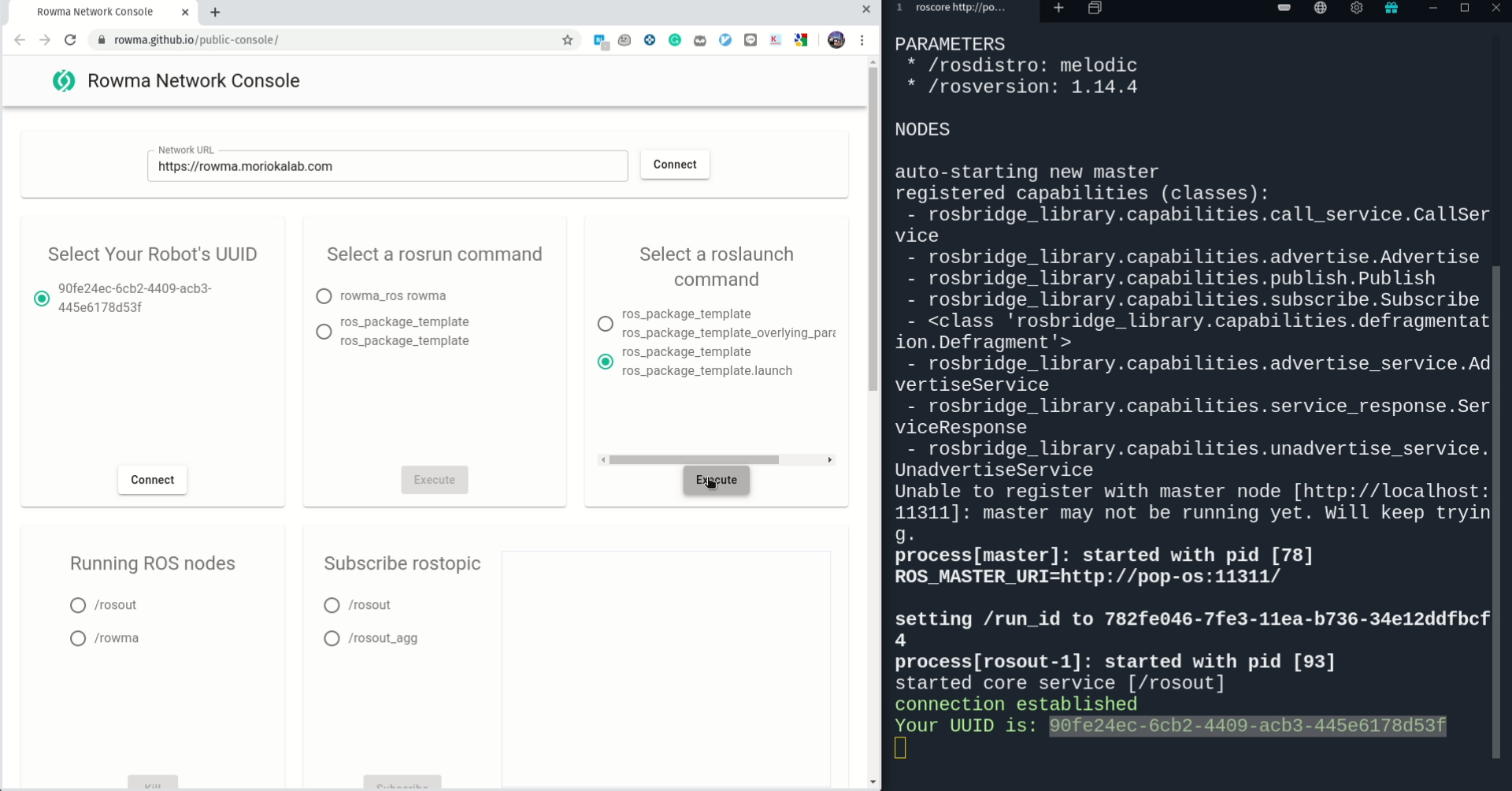
After you click the Connect button, then available commands appears.
You can select a command and click it.
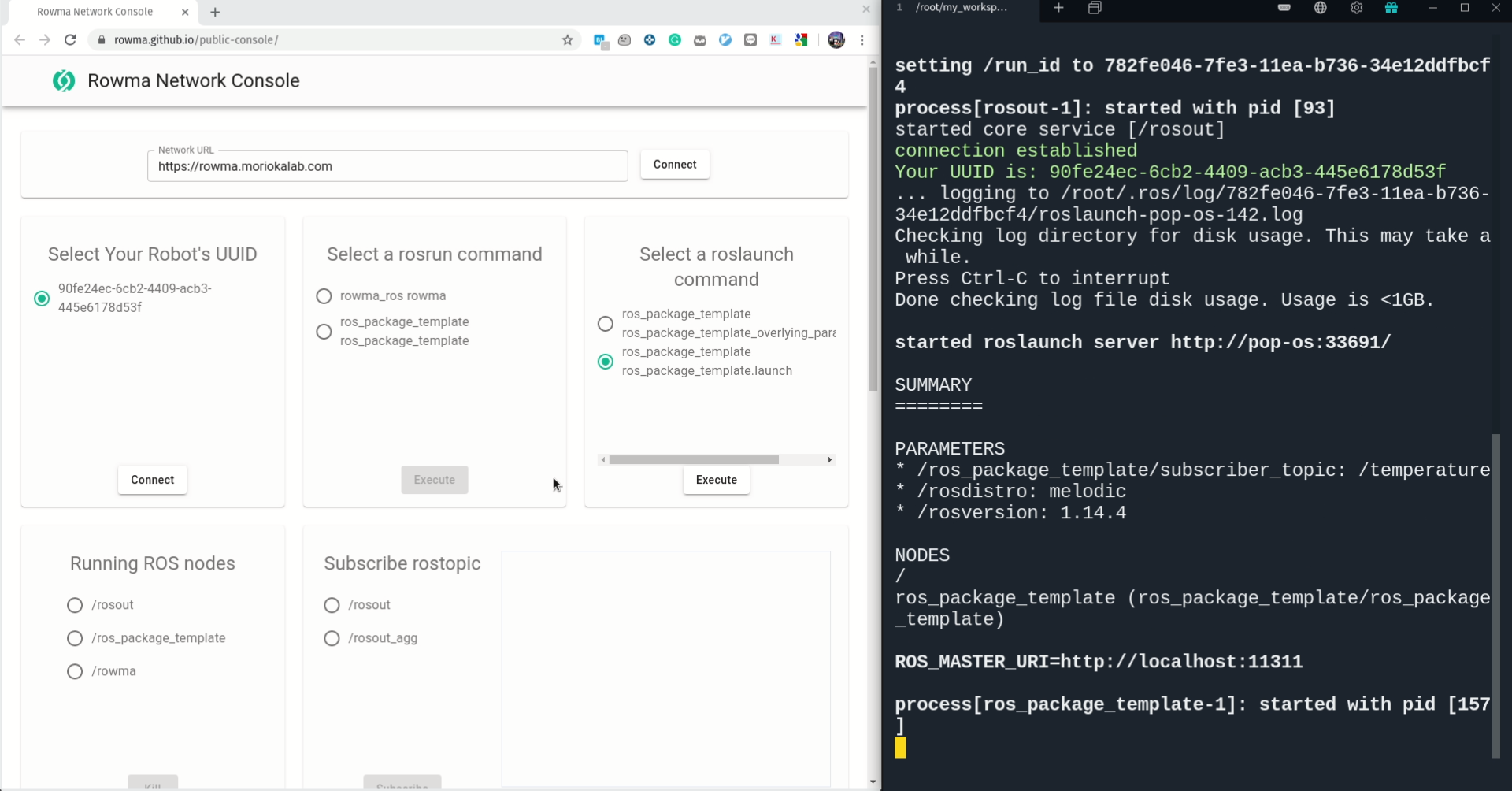
Finally, a roslaunch command starts over the Internet.