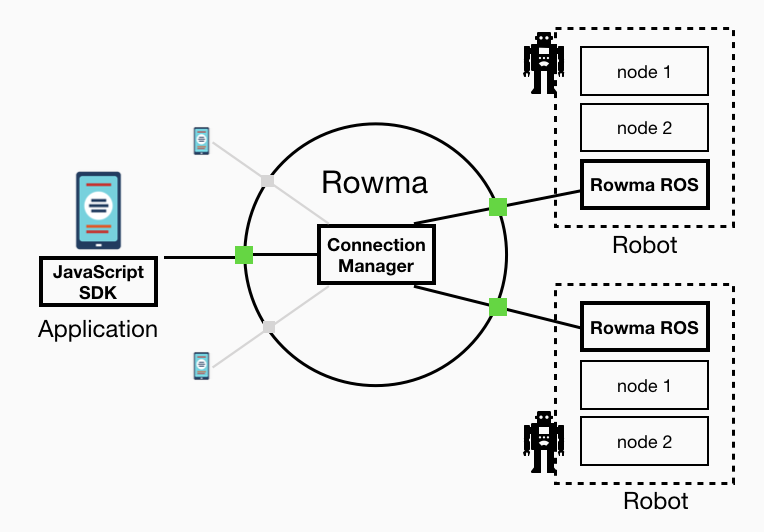
System Architecture
This system consists of 3 components: 1) ConnectionManager; 2) Rowma ROS; 3) Application implemented by using a distributed SDK.
This is the overview of the system architecture.
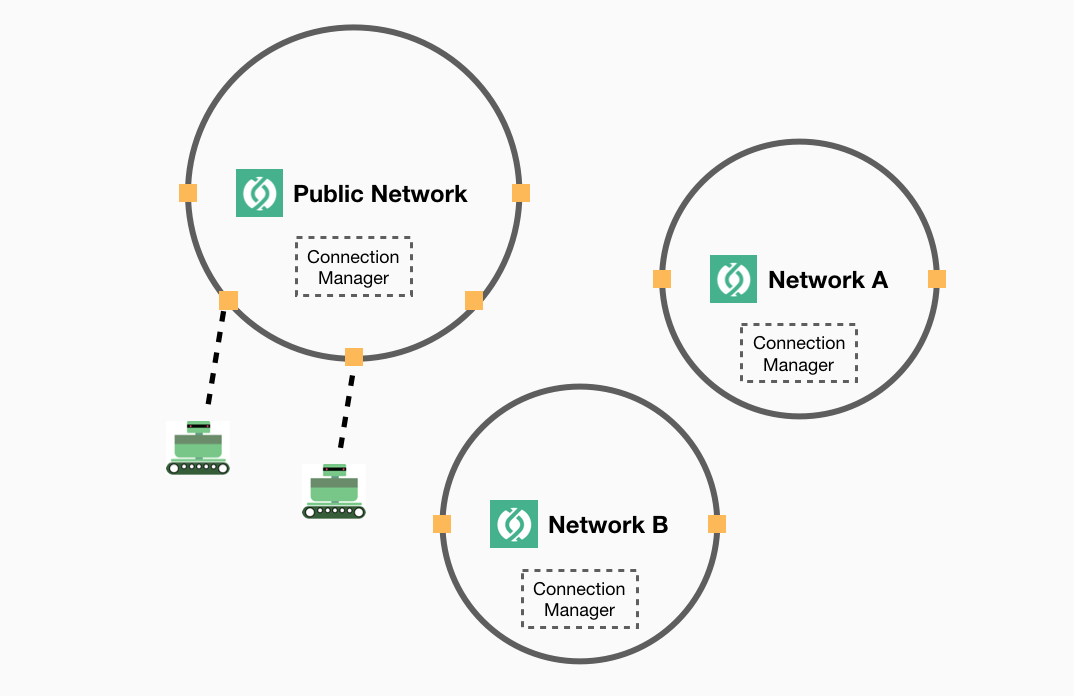
Rowma Network
The types of Rowma Network are public and private.
Each Rowma Network has 1 ConnectionManager. So developers can create a private network by hosting ConnectionManager.
We provide Public Network for test use and Rowma ROS try to connect the public network by default.
And the private-network owner can connect their robots to the network.