Delay Mesurement
The time lag of Application-to-Robot data transmission and Robot-to-Robot data transmission is investigated.
TL;DR
The time-lag can be ignored in most cases unless your system is a real-time system that requires 10 ms level response time.
Method
The measurement was performed by sending data while increasing the data size for one WebSocket connection little by little. Text data of 460 different sizes from 1 byte to 10 MB was used as the data.
The payload format is like following.
{
op: "publish",
msg: {
size: "10",
data: "aaaaaaaaaa"
},
timestamp: 1583912257.673818
}
Environment
Only 1 computer was used to conduct this experiment because of avoiding time lag between different machines. This means that 2 Rowma ROS Docker containers ran on 1 computer.
The environment where the ConnectionManager is on the same machine is the L environment, and the environment where the EC2 instance is on the EC2 instance is the C environment.
Result
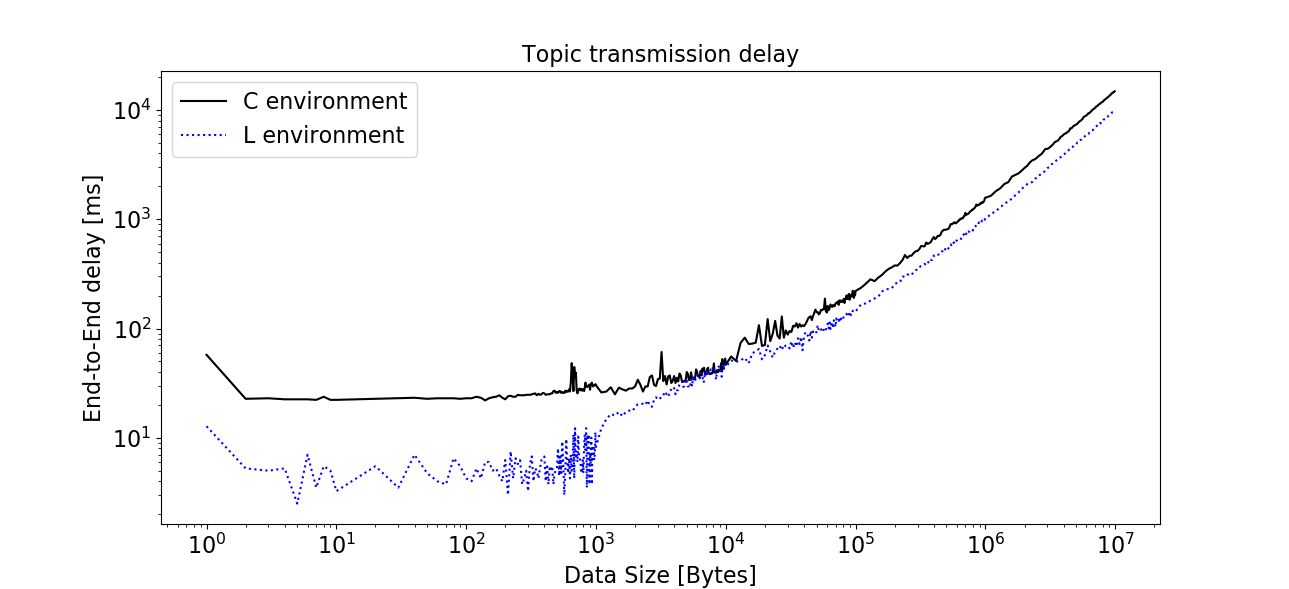
This graph is Application-to-Robot transmission delay.
This graph is Robot-to-Robot transmission delay.
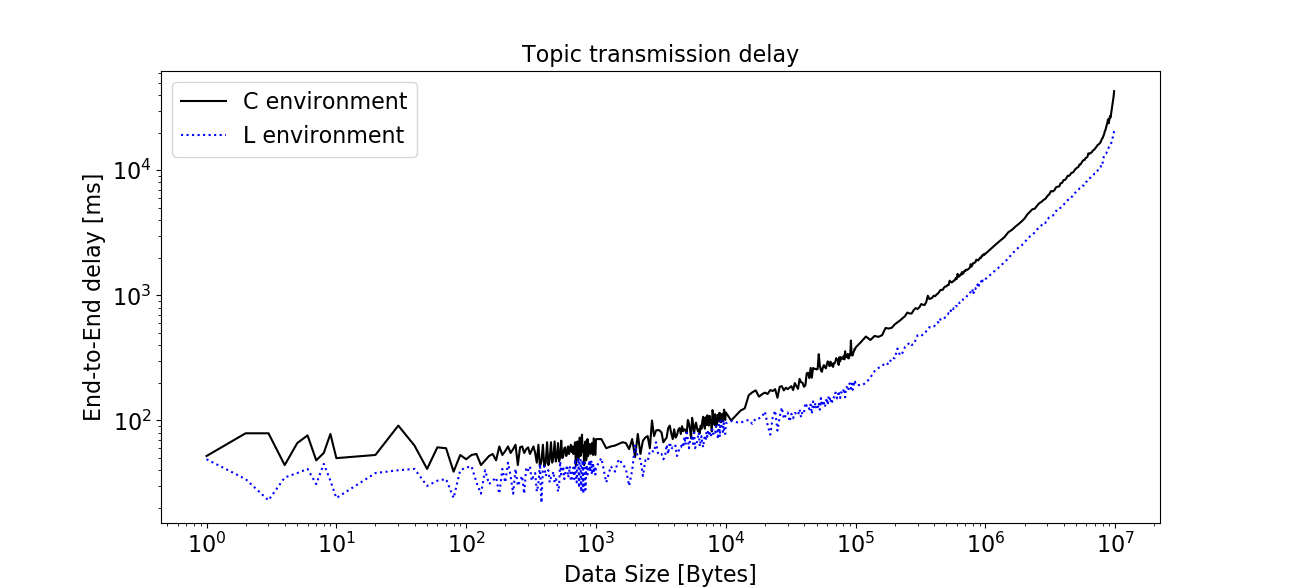
These experiments show that Rowma can transmit data among Application and Robot with relatively low latency (<100ms) if the data size is less than 100KB (e.g. /scan is 10KB-15KB).
When you feel laggy
Please make sure following points:
- Server location and robot location
- Data size
- Data receiver environment