Rowma: A Reconfigurable Robot Network Construction System
Rowma is a framework for ROS-based robots that can form a robot network easily.
The key features are below:
- Execute a rosrun/roslaunch command over the Internet
- Send a rostopic over the Internet
- Distribute SDKs to develop an application
- Send a rostopic among an application and a robot or between robots
- Integrate a robot easily
- Reconfigurate robot nodes easily
This video shows an example of controlling a wheeled robot over the Internet from a smartphone.
Getting Started
There are 2 steps to connect your robot to Rowma network.
First, clone rowma_ros into your ROS workspace from the GitHub repository (we are planning to upload it to apt repository).
python <(curl "https://raw.githubusercontent.com/rowma/rowma_ros/master/install.py" -s -N)
Second, run the node.
Note that your robot will connect to the default public network for test use.
$ roscore
$ rosrun rowma_ros rowma
You would see the output of Your UUID is: xxxxxx-xxxxxx-xxx-xxx after your robot successfuly connects to the network. That is your robot's UUID to connect.
The next step is operating the connected robot over the Internet. Open https://rowma.github.io/public-console.
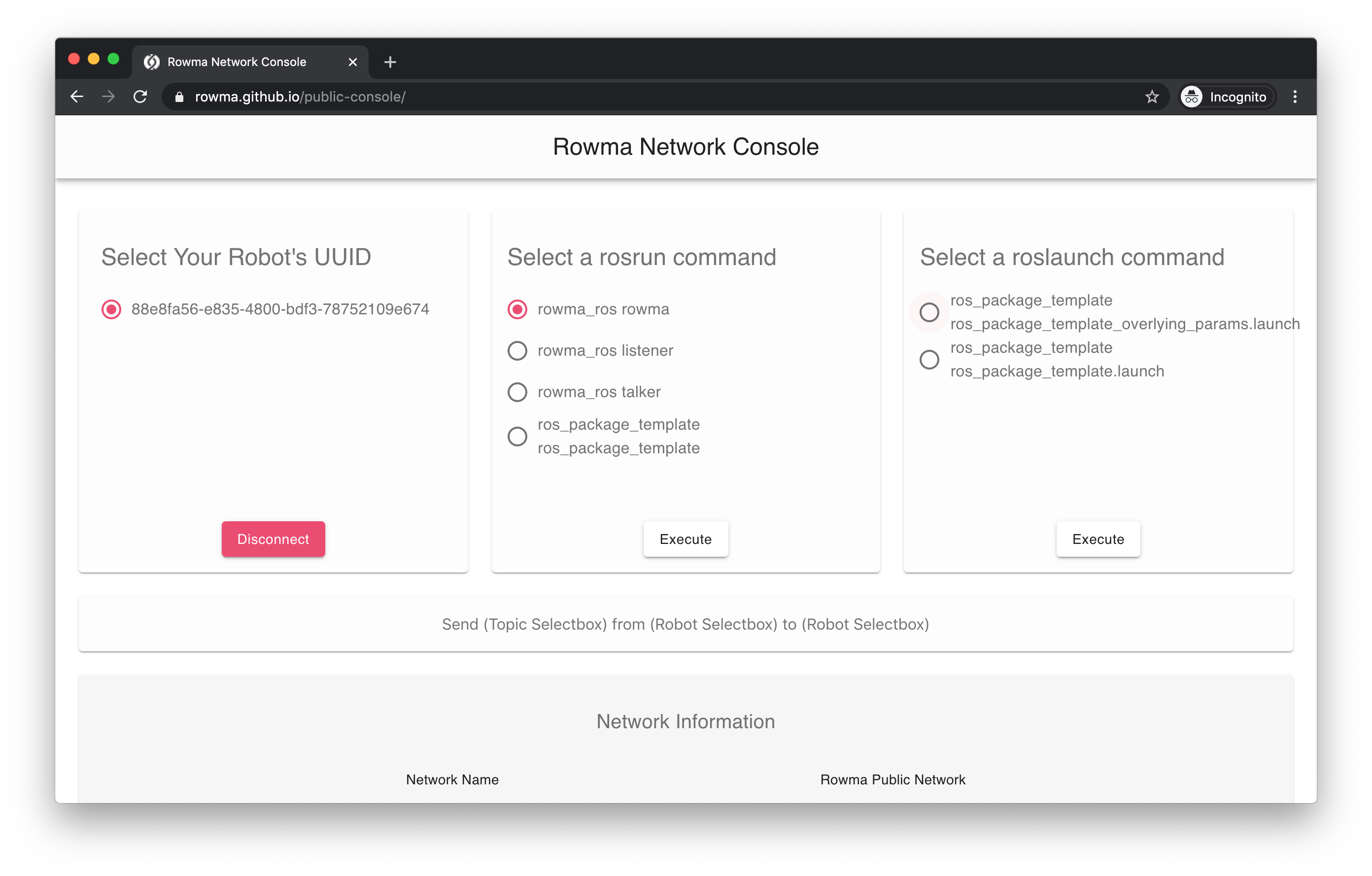
First, select the robot's UUID from the select box and push the Connect button. After that, you can see a list of rosrun/roslaunch commands in a select box.
Finally, you can push Run button after select a command.
Acknowledgement
This software is maintained as a part of research in the Cloud Robotics field.